1. 서 론
우리나라 고속도로 버스전용차로는 버스 이외에도 6인 이상 탑승한 9인승 이상 승합차도 이용할 수 있다(Jang, 2021). 문제는 6인 미만 탑승한 승합차가 버스전용차로를 이용할 경우 이를 단속해야 하지만, 차량 유리의 짙은 썬팅(tinting) 등으로 탑승인원 육안 식별이 어려워 인력식 단속 한계점이 존재한다(KOTI, 2012). 경찰의 인력 단속(Fig. 1)은 안전사고를 유발할 가능성이 있고, 불필요한 지정체를 발생시켜 주행안전 및 교통효율성 측면에서 문제점 존재한다(MRC, 2004).
고속도로 버스전용차로 단속을 위해서 승합차에 탑승하고 있는 인원의 수를 검지할 수 있는 기술과 위반차량에 대한 번호판 인식기술의 통합이 필요하다. 본 연구에서는 적외선 카메라 및 조명, 차량 존재여부 트리거 발생기, 번호판 인식 카메라를 포함하는 전용차로 단속시스템을 개발하였다.

2. 버스전용차로 단속시스템 구성
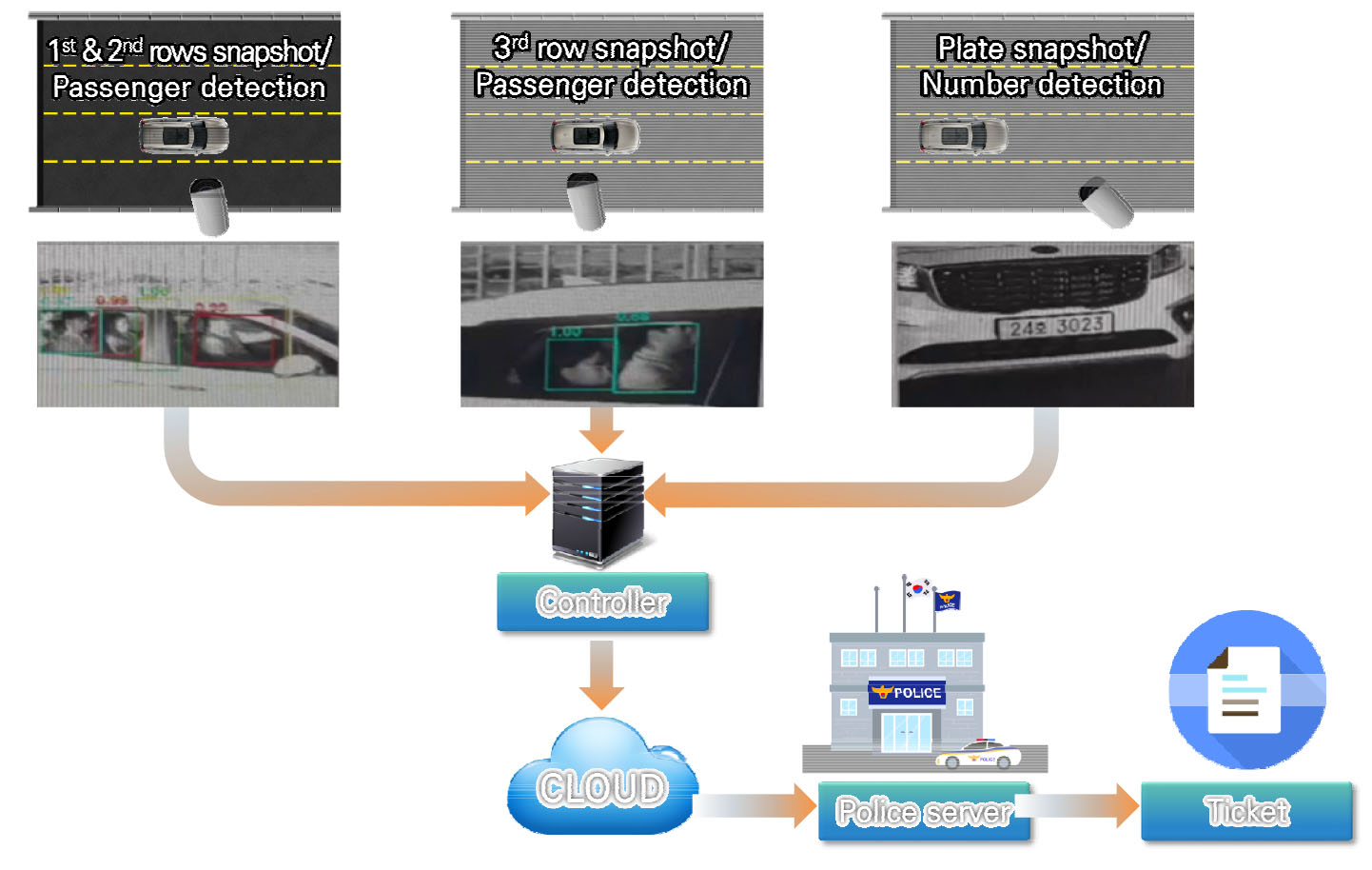
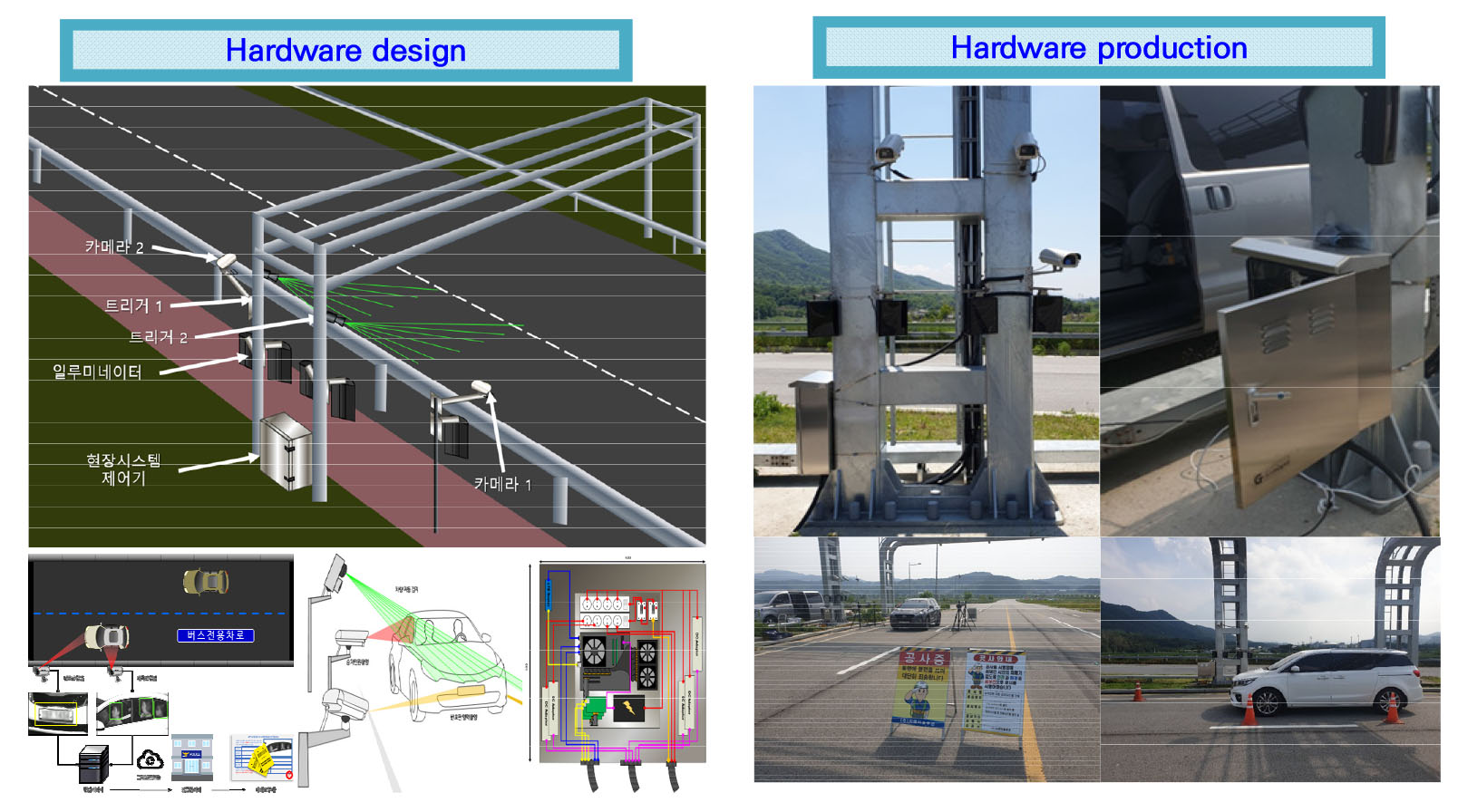
고속도로 버스전용차로 단속시스템은 크게 하드웨어(Fig. 2)와 소프트웨어(Fig. 3)로 구성되고, 하드웨어는 영상 촬영부, 차량 검지부, 제어부로 구성된다. 영상 촬영부는 차량 내부에 탑승한 모든 인원을 촬영하는 것을 목적으로 하며 카메라 모듈, 렌즈, 필터로 구성된다. 차량 검지부는 번호판 인식용 카메라 및 레이저 트리거로 구성되고, 제어부는 입‧출력 MCU(Main Control Unit), 방수 방진 함체 및 전원부로 구성된다.
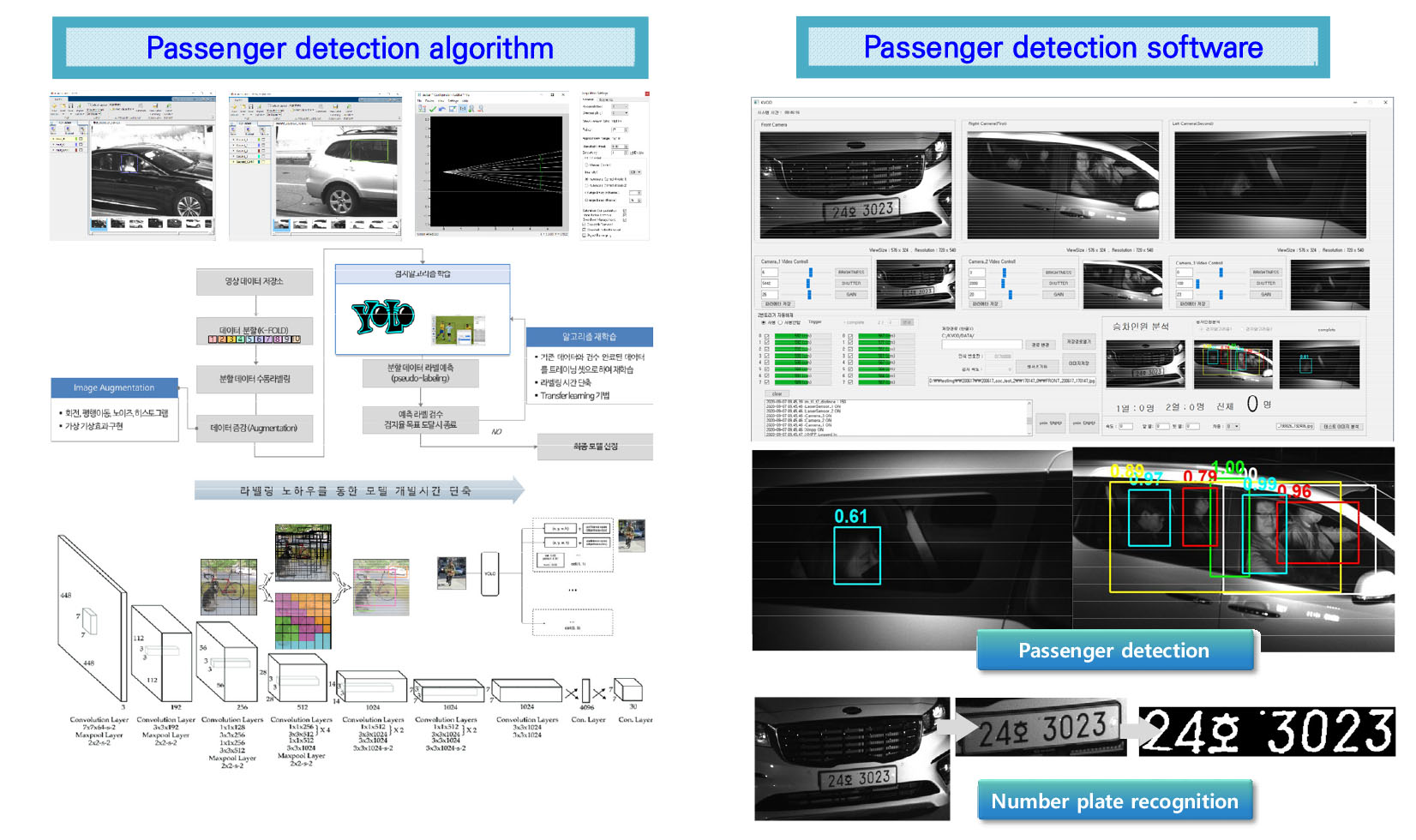
소프트웨어는 현장 프로그램, 통신 프로그램, 센터 프로그램으로 구성된다. 현장 프로그램은 입력되는 신호를 제어 및 수집 데이터를 처리하고, 통신 프로그램은 현장 프로그램에서 수집된 데이터를 가공하여 서버로 전송하며, 센터 프로그램은 현장시스템 모니터링, 수집 데이터 저장, 조회 및 검색, 통계 기능 수행한다. 현장 프로그램에 탑재된 승차인원 검지 소프트웨어는 신속한 객체인지 성능을 고려하여 딥러닝 알고리즘 중 객체인식 속도가 가장 빠르다고 알려져 있는 You Only Look Once(YOLO) 알고리즘이 적용되었다(Redmon and Farhadi, 2018).
3. 버스전용차로 단속시스템 평가
개발시스템 성능평가를 위해서 한국건설기술연구원 연천 SOC 실증실험센터 내에 있는 실증시험주로에서 고속도로 버스전용차로 단속 시 승차인원 검지기 필요한 승합차 2대(카니발, 스타렉스)를 이용해 주간, 야간, 탑승객 1~6인, 차량운행속도 20~100 km/h 변경해가면서 실제 탑승인원과 검지 인원을 비교하였다(Fig. 4).

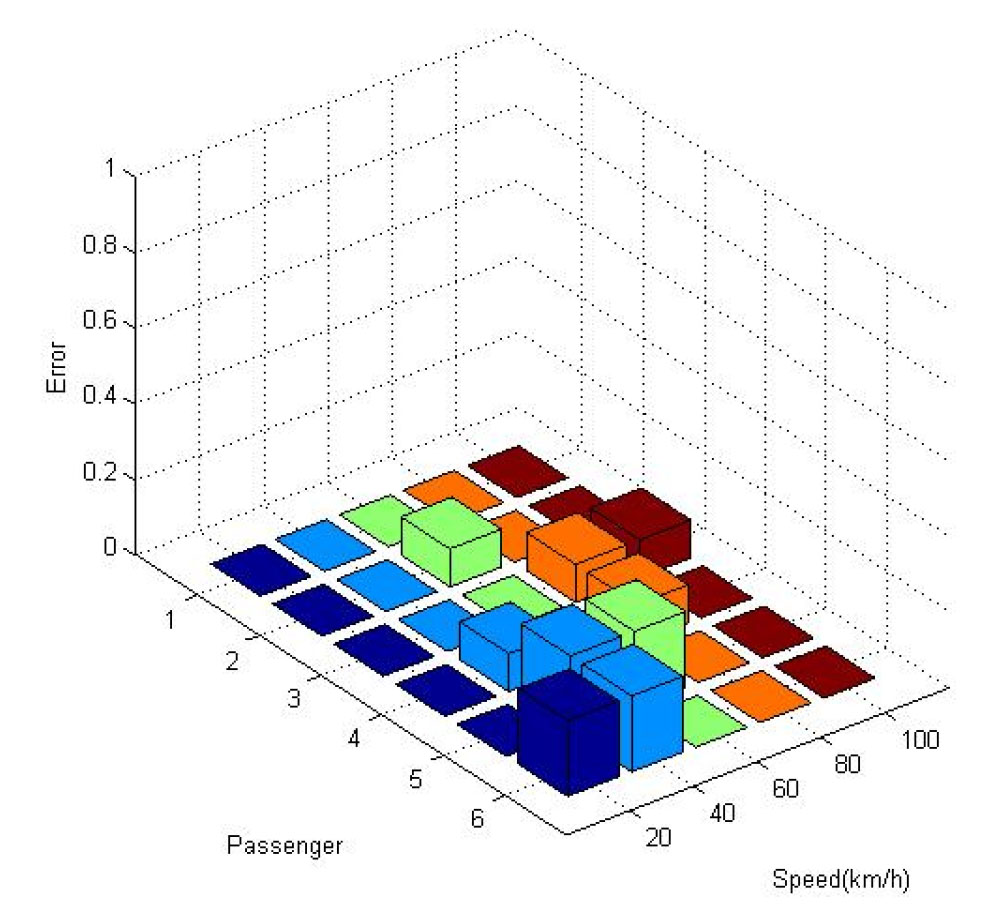
평가결과, Table 1 및 Fig. 5에서 보듯이 탑승인원별로 0~8%의 오차를 보였으며, 평균 오차는 4%로 당초 목표성능(5% 이내)을 만족하는 것으로 나타났다. Table 1의 왼쪽 테이블은 사진(이미지) 육안판독 결과와 개발시스템의 검지결과를 비교한 결과이고, 오른쪽 테이블은 탑승인원별 속도별 검지오차를 산정한 결과이며, Fig. 5는 이에 대한 그래프를 나타낸 것이다. 그래프에서 각 축은 탑승인원(명), 검지오차, 차량속도(km/h)를 나타낸다.
Table 1.
Test results: Confusion matrix for number of passenger (left) and speed (right)
4. 결 론
현재 고속도로 버스전용차로 단속은 순찰차에 의해 인력식으로 수행됨에 따라 단속에 따른 불필요한 교통지체가 발생하고, 자칫 단속으로 인한 사고가 발생할 수 있어서 이에 대한 대책마련이 시급하다(Schijns and Eng, 2006).
본 개발기술을 활용하여 고속도로 버스전용차로 단속을 수행할 경우, 인력식 단속에 따른 역효과를 제거할 수 있고, 단속의 효율성을 높일 수 있어서 버스전용차로 시행효과를 극대화할 수 있다. 개발시스템은 Fig. 6과 같이 기존의 단속시스템과 유사한 형태로 활용될 수 있을 것으로 사료된다.