

1. 서 론
2. 인텔리젼트 컴팩션(IC) 시스템
2.1 IC 시스템의 구성
2.2 IC 시스템의 다짐도 측정
2.3 IC 시스템 결과 보고 방법
3. 인텔리젼트 포설 시스템
4. 해외 인텔리젼트 포장 관리 시스템 고찰
5. 결 론
1. 서 론
아스팔트 포장 시공은 포장 재료의 품질변동, 시공시의 시공장비, 작업자, 기후환경 등의 다양한 환경에 노출되어 있으며 이에 따른 품질의 변동이 발생한다. 예를 들어 기온과 포설 두께에 따라 혼합물의 냉각 속도가 달라지며, 포설 전 바닥면의 종류와 바닥 온도에 의한 영향도 크게 작용한다. 따라서 기후환경을 고려하여 시공하여야 하지만 시공 중의 변화요인을 지속적으로 관리하는 것은 한계가 있다.
이에 따라 아스팔트 포장에서 국부적으로 밀도가 적거나 하부층과의 접착이 불량한 구간 등에서 포트홀과 같은 파손이 조기에 발생할 수 있고, 평탄성에도 큰 영향을 받는다. 그리고 이러한 품질변동으로 포장수명이 줄고, 조기 보수가 필요한 원인이 된다.
미국 워싱턴주에서 이루어진 Linden et al.(1989)의 연구에 따르면 포장 시공시의 공극률이 1% 증가될 경우 포장 수명이 10% 줄어든다. 이를 바꿔 말하면, 포장 시공시 품질관리를 높여서 공극률을 1% 이상 낮출 경우 10% 이상 수명이 연장되는 효과를 달성할 수 있다. 따라서 해외에서는 균질한 아스팔트 포장을 시공하여 포장 수명을 증진하기 위해 인텔리젼트(Intelligent) 아스팔트 포장 기술이 개발되어 시도되고 있다. 본 논문에서는 국내 아스팔트 포장의 품질향상을 위해 관련 기술 현황을 조사 및 고찰하였다.
2. 인텔리젼트 컴팩션(IC) 시스템
2.1 IC 시스템의 구성
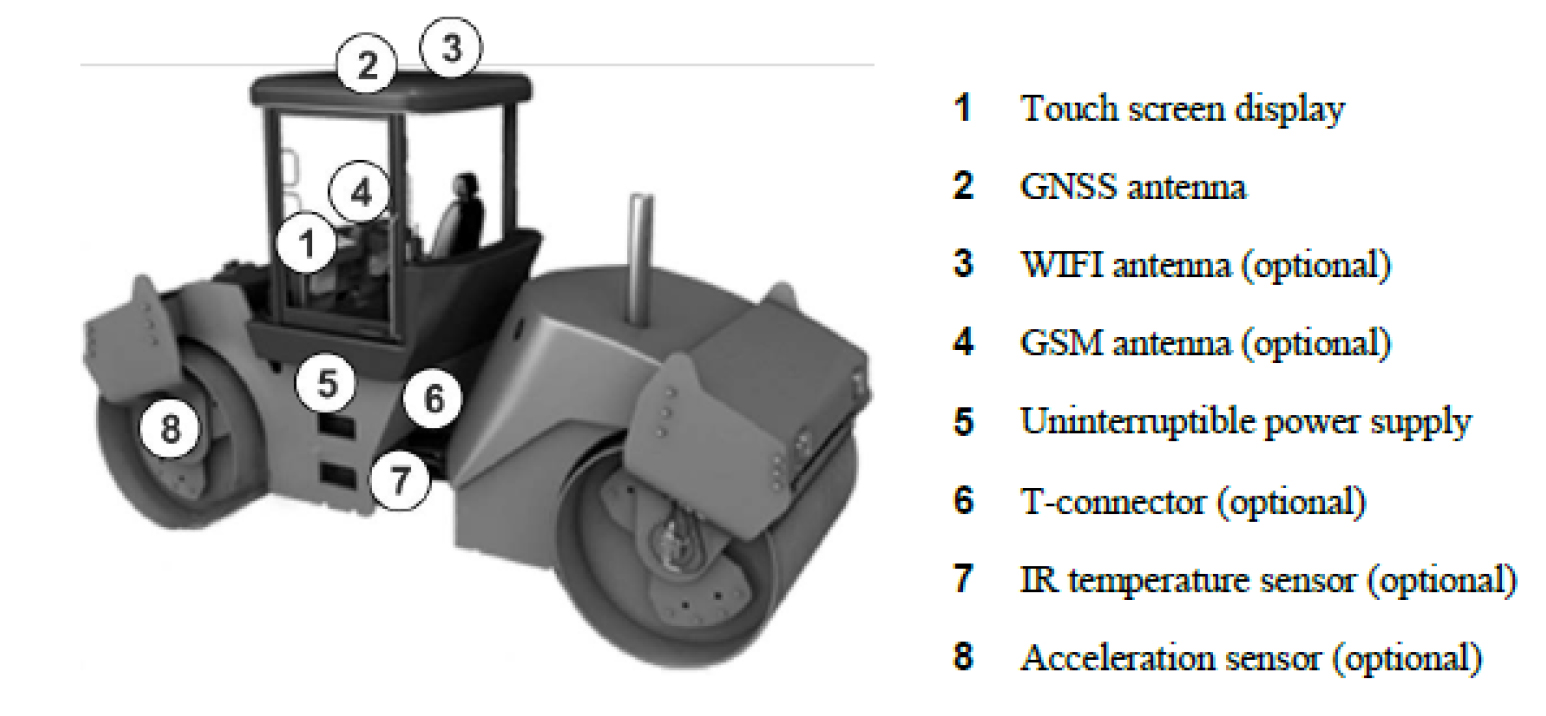
미국에서는 아스팔트 포장 시공관리 향상을 위해 2014년에 위치기반의 포장 다짐 관리 방법인 IC(Intelligent Compaction) 기준을 만들었다. 이 기준에서는 IC를 적용한 시공시 롤러 다짐에 필요한 GPS 기준, 다짐횟수, 다짐속도, 다짐도 등의 측정항목 및 방법을 정의하였다. GPS 및 수신기 장치가 각 IC 롤러에 설치되어야 하고, 위치를 모니터링하고 롤러 다짐 횟수를 추적하며, 가속도계 기반 측정 시스템으로 다짐도를 측정한다(FHWA, 2014). 일반적으로 IC 롤러는 Fig. 1과 같이 고정밀 GNSS 안테나, 다짐도 측정용 가속도 센서, 적외선 온도계, 디스플레이 장치 등으로 구성된다.
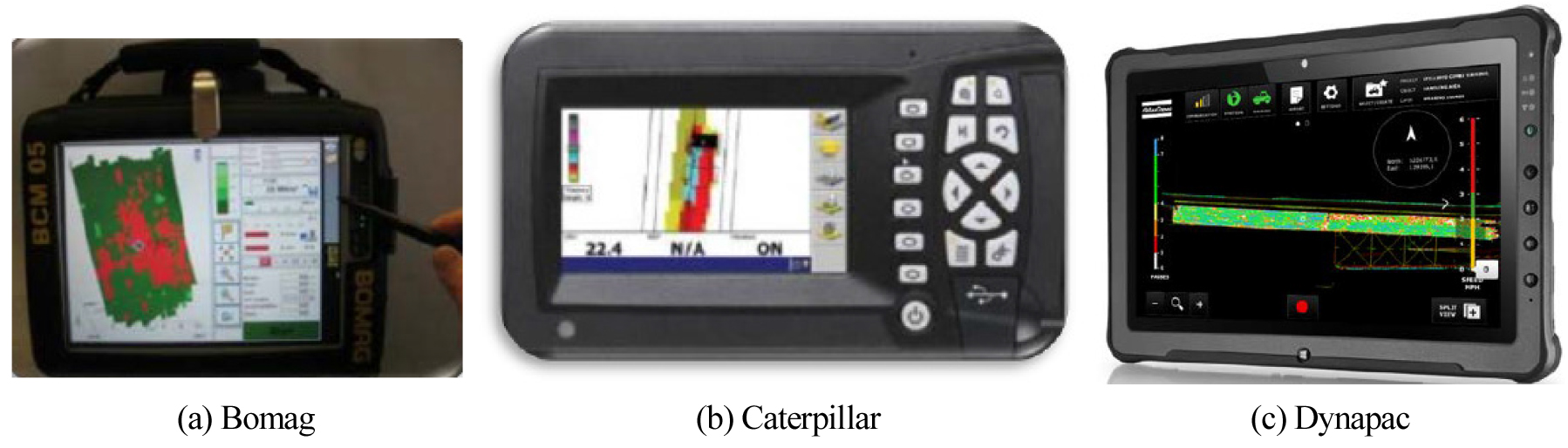
작업자는 Fig. 2와 같은 디스플레이 스크린으로 다짐횟수나 다짐도 등의 정보를 선택하여 볼 수 있다. 스크린의 내용은 제작 회사에 따라 다르지만, 현재온도, 포장온도, 다짐횟수, 다짐도(강성) 등을 표시한다.
2.2 IC 시스템의 다짐도 측정
IC롤러는 가속도센서의 값을 이용하여 다짐도를 실시간으로 산출한다. FHWA에서는 롤러에 의한 다짐도 분석 결과를 ICMV(Intelligent Compaction Measurement Value)라고 정의하였으며 다음과 같이 1~5 단계의 로드맵을 제시하였다(Intelligent Construction, 2020).
∙1단계 – 진동 다짐에 의해 얻어진 가속도 반응값을 FFT(Fast Fourier Transform) 분석하고, 고조파의 비를 이용하여 경험적으로 해석
∙2단계 – 정적 다짐 에너지와 회전저항에 따른 반응모델을 기반으로 에너지 계수를 계산
∙3단계 – 이산 진동 모델, 연속 정적 모델 등에 기반한 단순화된 정적 기계적 모델로 강성 계수, 저항, 탄성 등 계산
∙4단계 – 다양한 ICMV 모델을 혼합한 동적 메커니즘에 따른 모델로 저항, 탄성 등 계산
∙5단계 – 동적 메커니즘 및 인공 지능이 조합된 모델로 포장의 밀도와 탄성 등 계산
현재 대부분 강성 개념의 값으로 산출되고 있으며, 롤러 제작사별로 Table 1과 같이 Evib, CCV, HMV, CMV 등이 주로 사용되고 있다. 다만, 진동 다짐 장비에만 적용할 수 있도록 개발되어 무진동 다짐장비에 적용할 경우 대부분 해당 값이 얻어지지 않는다.
Table 1.
ICMV of Intelligent Compactor
| Vendor | Bomag | Sakai | Wirtgen/Hamm | Trimble |
| ICMV |
Evib (Vibration modulus) |
CCV (Compaction Control Value) |
HMV (HAMM Measurement Value) |
CMV (Compaction Measurement Value) |
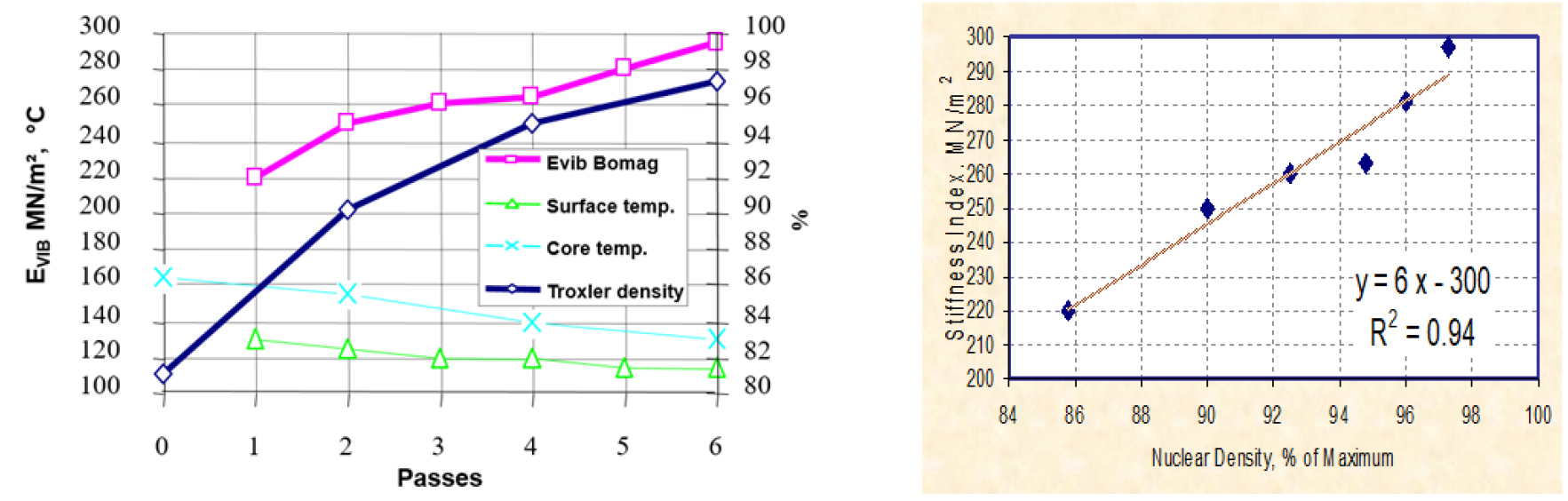
IC 롤러를 이용한 다짐도는 미국 FHWA에서 분석한 결과 Fig. 3과 같이 현장밀도시험기(Troxler density)와 비교하여 유사한 추세인 것으로 확인하였으며, Fig. 4에서 0.94이상의 높은 상관성을 얻었다고 하였다(Arasteh, 2007). 따라서 IC 진동 롤러를 사용할 경우 시공 중 실시간으로 측정되는 다짐도 데이터를 이용하여 포장 다짐 종료 시점을 판단하며 균질한 포장을 할 수 있을 것으로 판단된다.
2.3 IC 시스템 결과 보고 방법
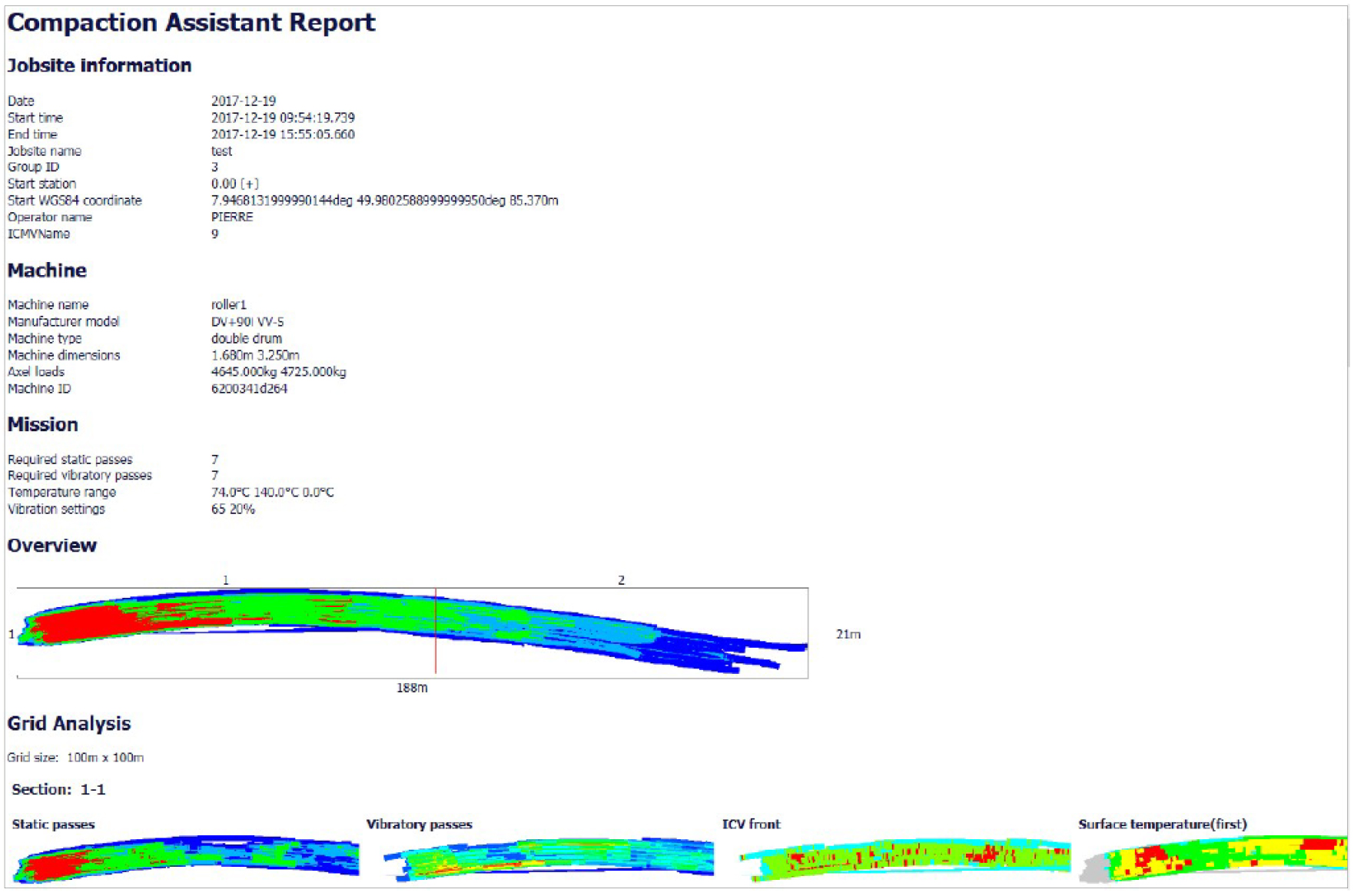
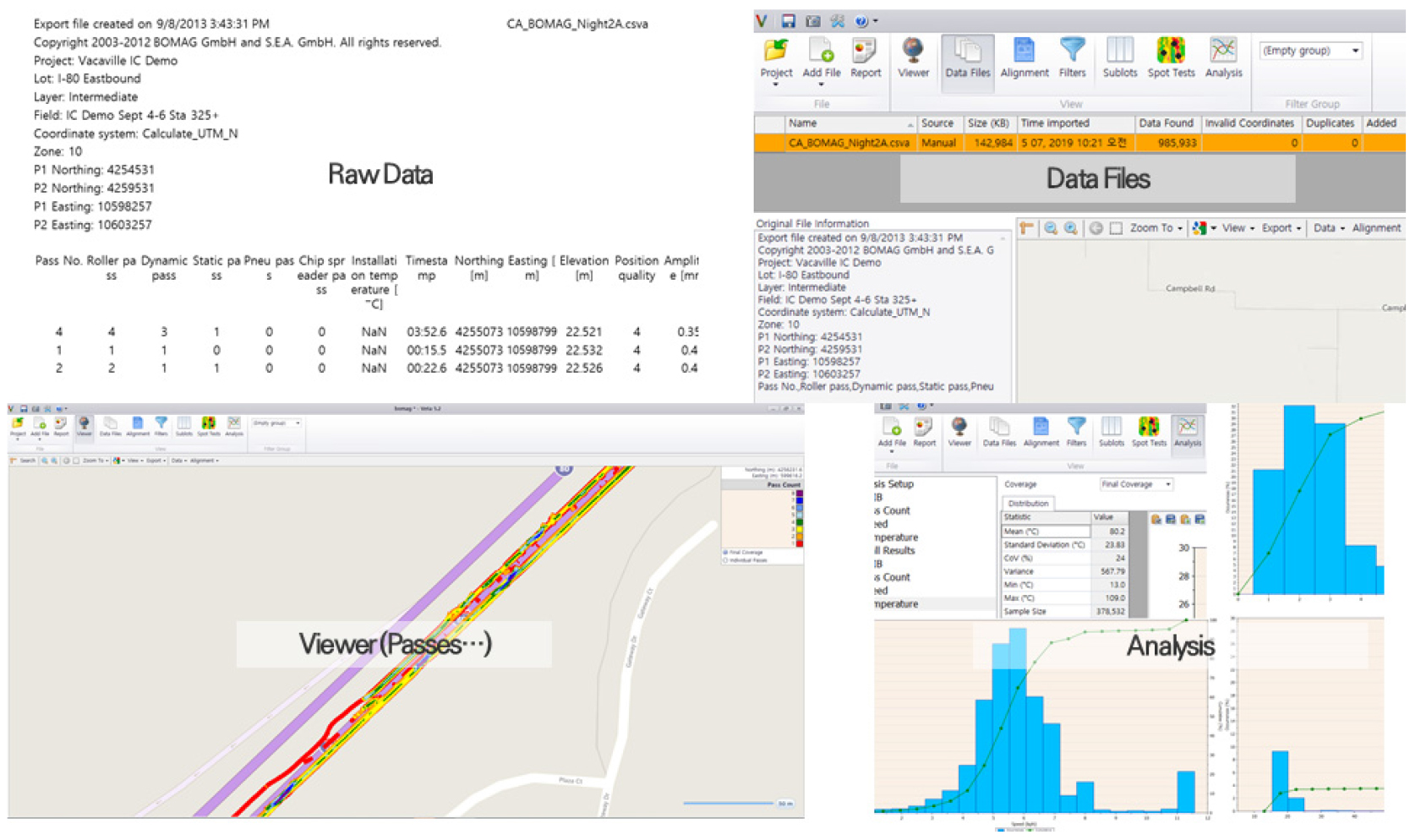
미국에서 IC를 적용한 시공에서 측정되는 데이터는 일반적으로 시공장비 모듈 제작사의 클라우드 시스템에 저장되며, Fig. 4와 같이 분석된 결과를 얻을 수 있다. 현장 시공 중의 다짐 결과 보고 형식은 제작사에 따라 차이가 있으며, 일반적으로 다음 항목으로 구성되어 있다.
∙현장 기본 정보: 현장명, 시공일, 시작시간/종료시간, 시작된 위치정보, 작업자 등
∙시공장비: 장비명, 모델명, 종류(진동 탠덤 롤러, 타이어 롤러 등), 장비 크기(드럼 폭, 드럼 직경, 장비 길이), 축중, 장비 ID
∙시공기준: 정적 다짐 횟수, 진동 다짐 횟수, 포장온도 기준 범위, 진동 셋팅
∙시공결과: 온도, 다짐횟수, 다짐도(강성)
미국에서는 아스팔트 포장 발주시 IC 적용을 의무화하는 경우가 있으며, 이 경우 시공사는 미국 각 주의 DOT에서 사용하는 IC 관리용 지도기반 프로그램인 VETA에 매일 전송한다. VETA 프로그램은 Fig. 5와 같이 계측된 자료를 불러와서 다짐횟수, 다짐도 등의 값을 도면으로 보거나 분석된 값을 보고 확인할 수 있다. Figs. 4, 5와 같은 분석은 아스팔트 포장 시공 중 품질변동을 확인하고, 이 후 시공시에 문제점을 개선하기 위한 방법으로 사용될 수 있다.
3. 인텔리젼트 포설 시스템
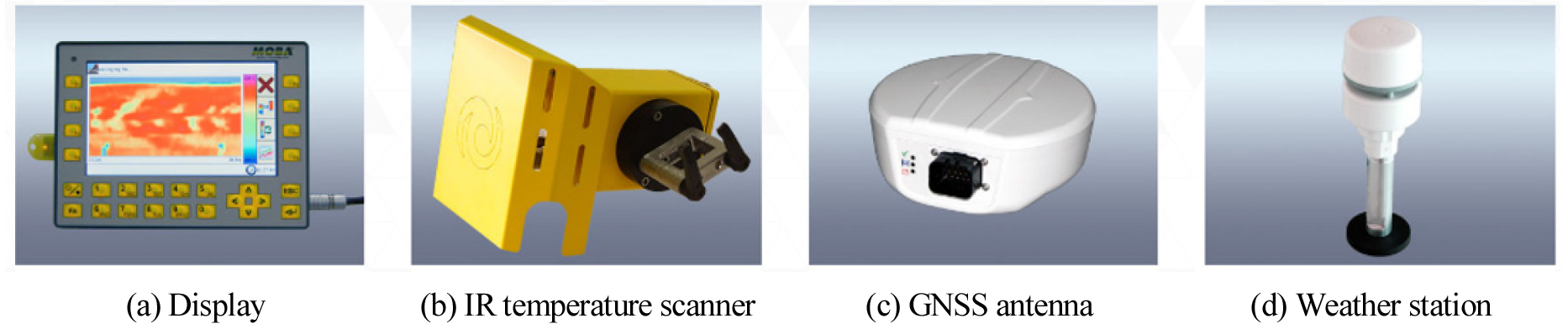
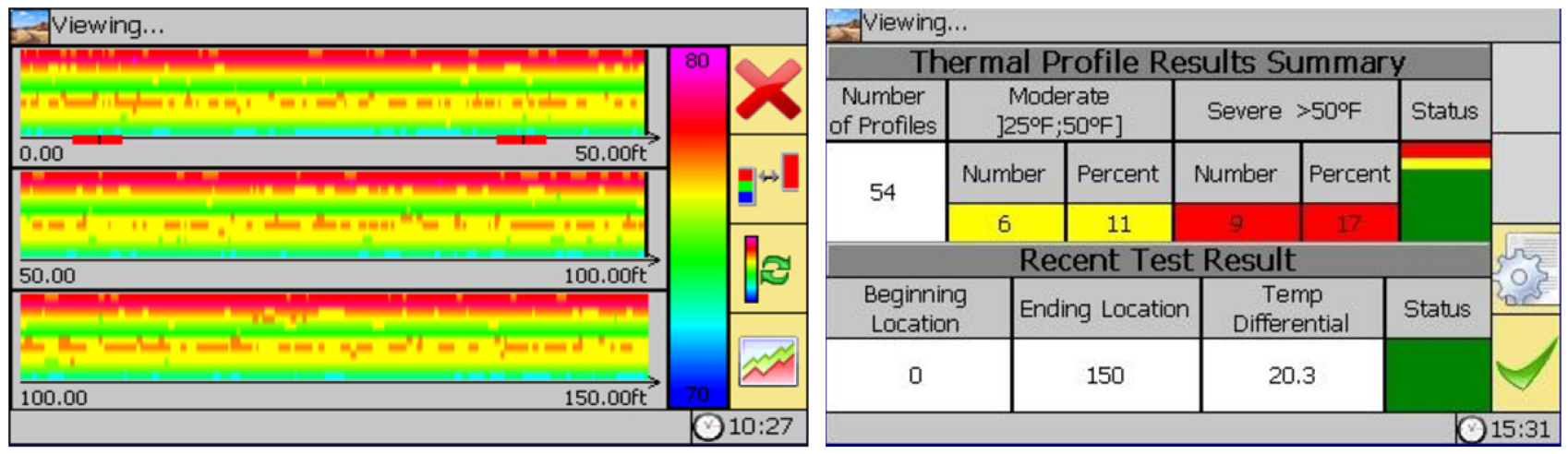
아스팔트 포장 포설시의 품질관리를 위한 모듈은 일반적으로 Figs. 6, 7과 같이 적외선 카메라나 적외선 스케너, 고정밀 GNSS(Global Navigation Satellite System) 안테나, 디스플레이 장치, 기후통합센서 등으로 구성된다. 그리고 포설시 측정 결과는 Fig. 8과 같이 시작구간, 종료구간, 포설구간별 포장 표면 온도, 온도 편차, 문제 구간 개수와 비율 등이 표시된다.

4. 해외 인텔리젼트 포장 관리 시스템 고찰
해외에서 아스팔트 페이버 및 다짐롤러에 적용하는 인텔리젼트 포장 관리 시스템은 실시간으로 포설 온도, 다짐 온도, 다짐 횟수, 다짐도 등을 측정하여 다짐 작업 효율을 높이고, 다짐밀도를 증가시킬 수 있다. 이에 따라 포장수명 증진 및 유지관리 비용을 절감할 수 있으며, 다양한 정보 자료를 축적하여 현황파악과 품질관리가 용이하다.
그러나 현재의 인텔리젼트 포장 관리 시스템을 분석한 결과 다음과 같은 한계성이 있다.
∙작업 결과를 VETA를 이용하여 분석할 수 있으나, 실시간이 아닌 사후처리 분석 및 저장
∙IC 시스템을 QC(Quality Control)에 사용하며, QA(Quality Assurance)는 별도 시험 실시
∙다양한 장비별 서로 다른 다짐도 평가 시스템
∙주로 포설 후 포장 표면 온도 관리와 다짐롤러에서의 측정값에 한하며, 아스팔트 혼합물, 페이버 운용 등의 연계성 부족
∙롤러에서 얻어지는 다짐도의 값을 QA에 활용할 수 있도록 지속적인 보완 필요
따라서 국내의 인텔리젼트 포장 관리 시스템의 개발시 기존 해외 사례의 문제점을 해결하기 위해서 다음과 같은 개선 방안이 고려될 필요가 있다.
∙아스팔트 포장 시공시 주요 품질관리 항목의 실시간 시공 관리 및 경고 시스템
∙인테리젼트 포장 관리 시스템 적용시 QA를 대체하거나 빈도를 낮추는 방안
∙국가 표준 인텔리젼트 포장 관리 시스템의 개발 및 적용
∙시공 위치 및 온도 기반 정밀 관리 시스템의 개발로 아스팔트 혼합물 생산, 포설, 다짐의 연계성 확보
5. 결 론
인텔리젼트 아스팔트 포장 시스템을 조사한 결과 다음과 같은 결론을 얻을 수 있었다.
1.인텔리젼트 포장 시스템은 고정밀 위치정보를 기반으로 아스팔트 페이버에서는 포설시 포설속도와 포장 온도를 측정하고, 롤러에서는 다짐횟수, 다짐온도, 다짐속도, 다짐도 등을 측정하여 현장 품질관리를 높일 수 있다.
2.IC 롤러를 이용한 아스팔트 포장의 다짐도는 장비에 따라 현장밀도시험기 결과와 높은 상관성을 갖는 경우가 있으나 아직은 품질관리 용도로 제한적으로 적용되고 있다.
3.인텔리젼트 포장 시스템을 국내 적용하기 위해서는 아스팔트 포장 다짐 뿐 만 아니라 아스팔트 혼합물 생산, 시공, 품질관리, 검사 등의 시공 과정에서 주요 요소를 실시간 모니터링하고, 통일된 시스템으로 관리할 수 있어야 할 것으로 판단된다.
