

1. 서 론
2. IG-IoT 보드(IoT 시스템) 개발
2.1 기존 상용 보드 적용성 평가
2.2 IG-IoT 보드 PCB 설계
2.3 IG-IoT와 기존 데이터 로거 간 비교 분석
3. 인디케이터 보완형 IoT 마샬 안정도 시험기 개발
3.1 IoT 마샬 안정도 시험기 개발 아이디어 및 제작
3.2 인디케이터 보완형 IoT 마샬 안정도 시험기 시험
4. IG-IoT Version-2 보드 PCB 설계
5. 추후 연구 계획
6. 결 론
1. 서 론
최근 들어 인터넷을 기반으로 모든 사물을 연결하여 통신을 하는 IoT (Internet of Things) 기술과 정보통신기술의 융합으로 이뤄지는 4차 산업혁명등의 첨단기술을 이용하여 다양한 분야에서 발전을 보이고 있다. 토목분야에서도 첨단기술을 접목시키는 추세이다. 현재 아스팔트의 종류, 온도, 입도, 유출량, 무게 등 상황실 뿐 아니라 Fig. 1과 같이 국내외 마샬 안정도 시험기를 통한 시험 시 기기조작부터 시험 데이터까지 실험자의 눈으로 데이터를 작성한다. 이 과정에서 오기 및 누락이 발생할 수 있으며 시험자의 숙련도에 마샬 안정도 시험에 영향이 있다. 또한 기존 마샬 안정도 시험기는 데이터를 프로그램에서 엑셀로 출력을 하여 데이터를 받는 형식으로 되어있어 작성자의 의도에 맞게 데이터를 수정하는 경우도 발생할 수 있다. 이에 IoT (Internet of Things) 기술을 활용하여 인위적이거나 의도적인 오류나 오타를 방지하도록 무선 공유 시스템으로 직접 전달되는 마샬 안정도 시험기의 개발이 필요한 실정이다. 따라서 본 연구에서는 마샬 안정도 시험기에 IoT 무선공유플랫폼을 적용하여 시험자의 오기를 막고 필요한 일부 데이터를 프로그램을 거치지 않고 컴퓨터나 핸드폰으로 전송하여, 현장에서 데이터 확인 이후에 전체 데이터를 프록시 서버로 전송이 될 수 있도록 기초 연구를 하였다.

2. IG-IoT 보드(IoT 시스템) 개발
기존의 시스템에서는 아스팔트 플랜트 실험실 데이터에 대한 실험자의 오기 및 누락의 여지가 있다. 따라서 본 연구에서는 기존 마샬 안정도 시험기에 장착하여 기존의 문제를 방지할 수 있는 IoT 무선공유플랫폼인 IG-IoT 보드를 개발하고자 한다. 따라서 기존 상용 보드 적용성 평가를 실시하였으며, 이에 따라 IG-IoT 보드 PCB 설계 및 IG-IoT 보드를 개발하고자 한다.
2.1 기존 상용 보드 적용성 평가
기존 상용보드에는 아두이노 및 라즈베리파이, 비글본 등이 있다. 그 중 전 세계적으로 사용하는 IoT 보드이자 소형 컴퓨터인 라즈베리 파이로 비교 분석을 실시하였다. 라즈베리 파이4는 저렴한 가격에 전력소모가 적다는 등의 장점을 가지고 있어 도로실내시험장비 적용 판단을 고려하였다. 하지만 센서 확장성의 불편함과 여러개의 센서를 동시에 사용하기에 보드의 센서 용량과 호환문제가 있다. 컴파일 테크놀로지 회사에 따르면 다른 단점으로 노이즈에 매우 취약한 구조로 되어 있어 산업용으로 사용하기에 부적합하다. 또 데이터 손상 위험이 있는 SD 메모리 카드를 저장 공간으로 사용하여 데이터가 안전하지 못하는 등 마샬 안정도 시험기 데이터 전송에 제약이 있다. 이와 같이 라즈베리 파이는 저가용 보드이므로 사양의 한계가 있다고 판단된다. 상기와 같은 결과는 Lee et al. (2020)의 연구에서도 알 수 있다.
2.2 IG-IoT 보드 PCB 설계
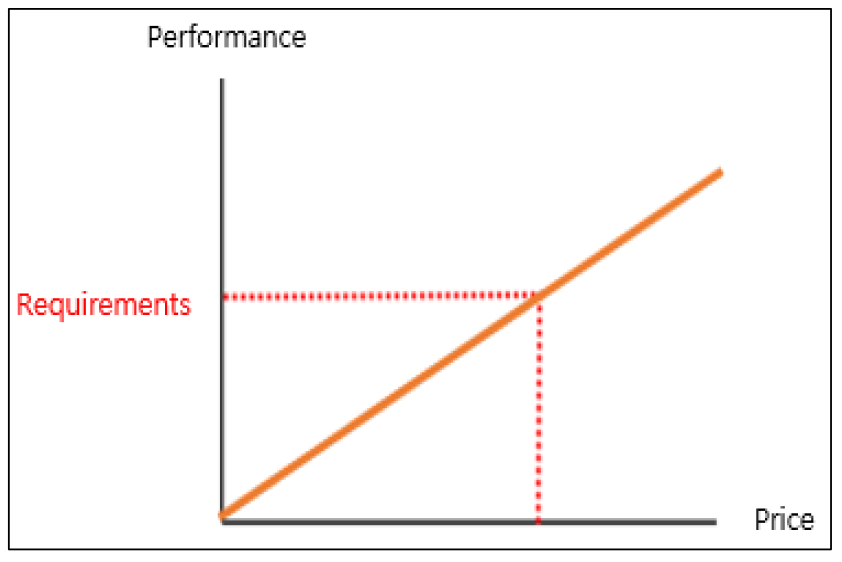
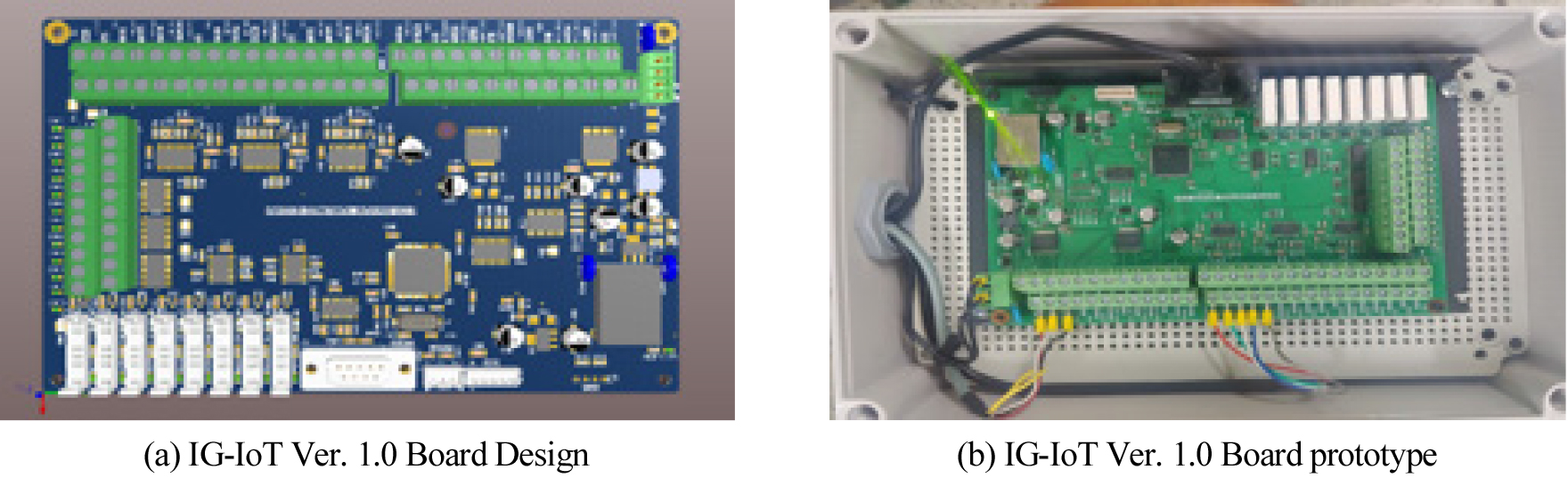
상용보드인 라즈베리 파이4의 단점들로 인하여 마샬 안정도 시험기의 사용에 부적합하다. 따라서 단점을 보완하고 Fig. 2와 같이 IG-IoT 보드 가격 및 성능 결정 개념을 설정하였다. 그리고 Fig. 3의 IoT 계측 센서 장치인 IG-IoT Version-1 보드 PCB 설계 및 IG-IoT Version-1 보드 시작품을 제작하였다.
2.3 IG-IoT와 기존 데이터 로거 간 비교 분석
IG-IoT와 Fig. 4의 독일 제품으로 전 세계에서 사용하는 초고가용 기존 사용 데이터 로거인 데베트론과 정확성 비교를 위해 포텐셔미터 변위 비교 시험과 로드셀 하중 비교 시험 실시 및 분석하여 적용성 평가를 실시하였다.

2.3.1 정확성을 위한 하중 비교시험 결과 및 분석
IG-IoT 적용성 평가를 위하여 Fig. 5와 같이 IG-IoT Version-1 보드와 데베트론으로부터 마샬 안정도 시험기의 5 t 로드셀 비교 시험을 실시하였다. 아스팔트 혼합물 생산 및 시공 지침(MOLIT, 2015)에 따르면 아스팔트 혼합물의 품질기준은 Table 1과 같다. 데베트론 5 t 로드셀 시험은 Table 2에 따르면 데베트론 5 t 로드셀 하중 시험에서는 최대 오차는 1.3%으로 나타났다. IG-IoT Version-1 보드 로드셀 하중 시험은 Table 3과 같으며 IG-IoT Version-1 보드 5 t 로드셀 하중 시험에서는 최대 오차는 1.2%으로 나타났다. IG-IoT Version-1 보드에서는 마샬 안정도 및 변형강도와 간접인장강도 시험 하중 값이 3 t 이하이므로 최대 하중을 3 t으로 제한하여 IG-IoT Version-1 보드 최적화가 필요하다고 판단하였다.
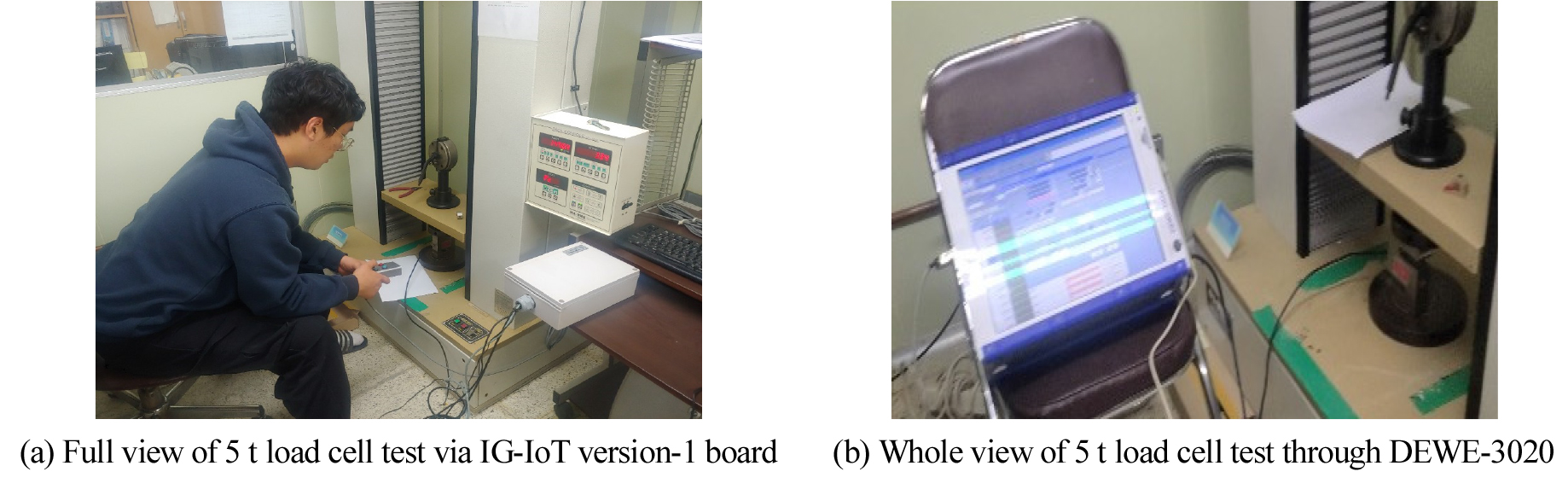
Table 1.
Quality standards for asphalt mixtures
Table 2.
5 t load cell test with DEWE-3020
Table 3.
5 t load cell test with IG-IoT version-1 board
2.3.2 정확성을 위한 변위 비교 시험 결과 및 분석
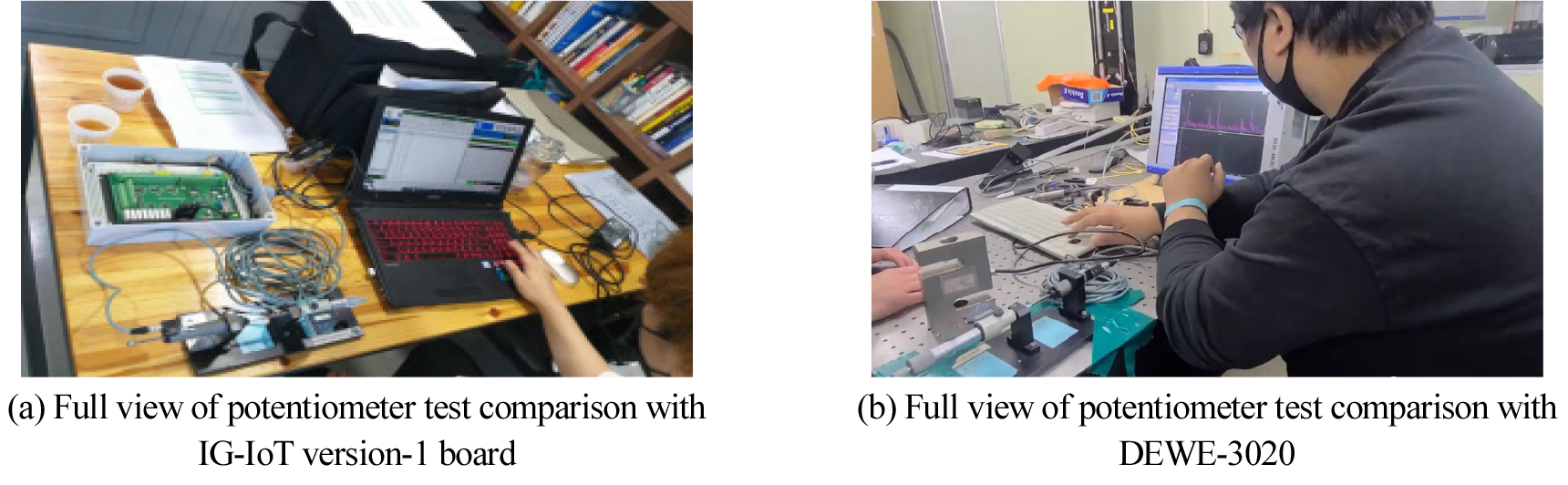
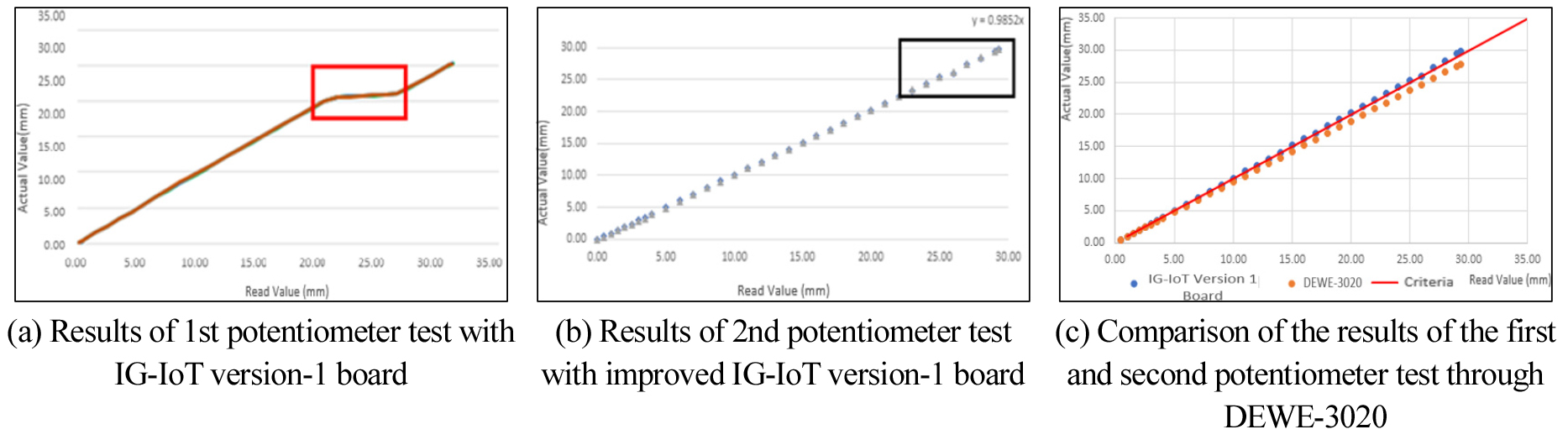
IG-IoT 적용성 평가를 위하여 Fig. 6과 같이 IG-IoT와 데베트론의 50 mm 포텐셔미터 변위측정 시험을 실시하였다. Fig. 7(a)와 같이 1차 IG-IoT Version-1 보드를 시험 하였으며 시험결과, 20 mm 이하일 경우 ±0.30 mm 로 0.02%의 오차가 발생했으나, (20 ~ 26) mm 구간에서 ±5.00 mm로 0.14% 오차가 발생하여 오차 수정을 위한 보완을 하여 재실험을 실시하였다. Fig. 7(b)와 같이 2차 IG-IoT Version-1 보드 시험 결과는 1차 IG-IoT Version-1 보드 시험에서는 게이지 펙터가 0.949에 비해 2차 IG-IoT Version-1 보드 시험결과는 게이지펙터가 0.9852로 정확도가 상승한 것으로 보인다. 그러나 (20 ~ 26) mm를 개선하였지만 (25.5 ~ 26) mm 부분에서 타 구간에 비해 오차가 비교적으로 크므로 필요시 추가 보완을 할 예정이며 마샬 안정도 및 변형강도, 간접인장강도 시험 변위 값이 20 mm 이하이므로 최대 변위를 20 mm으로 제한하여 IG-IoT Version-1 보드 최적화하고자 한다. Fig. 8와 같이 IG-IoT Version-1 보드와 데베트론 50 mm 포텐셔미터 비교 시험을 실시하여 고가장비인 기존 데이터 로거 대비 신뢰성이 있음을 알 수 있다.
3. 인디케이터 보완형 IoT 마샬 안정도 시험기 개발
현재 마샬 안정도 시험기는 오프라인으로 운용되고 있어 실험자의 오기 및 누락의 여지가 있다. 이러한 여지를 보완하기 위해 기존 마샬 안정도 시험기에 IG-IoT Version-1 보드를 적용시켜 인디케이터 보완형 IoT 마샬 안정도 시험기를 연구를 통해 개발할 예정이다.
3.1 IoT 마샬 안정도 시험기 개발 아이디어 및 제작
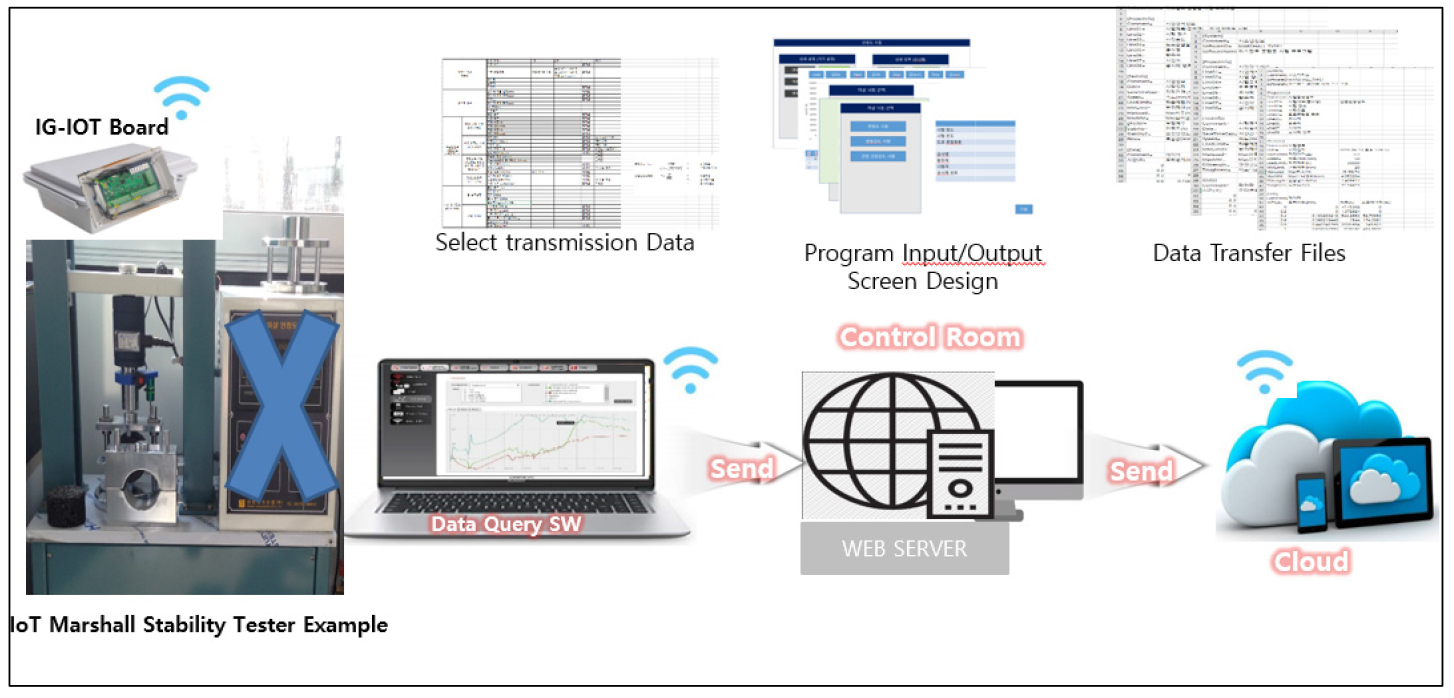
기존에는 단순 읽음 형식의 인디케이터형과 인디케이터와 DC모터에 기어 감속기를 사용하여 속도 제어형 인디케이터 적용 후 데이터를 컴퓨터로 전송 후 저장하는 방식의 마샬 안정도 시험기를 사용 중이다. 이를 개선하고자 개발 아이디어로서 IG-IoT Version-1 보드를 활용하여 개발을 실시하였다. IoT 시스템은 크게 센싱 기술 및 네트워킹 기술, 인터페이스 기술 등으로 구성되어 있다. 그러나 마샬 안정도 시험기의 IG-IoT Version-1 보드에서는 센서들 간의 제어기술이 필요하지 않으므로 제어 프로그램화 하지 않아 준 IoT 시스템이라 할 수 있다. 기존 데이터 로거와 IG-IoT Version-1 보드 비교 시험을 통하여 데이터 전송오류 확인 및 수정을 했으며 IG-IoT Version-1 보드을 개발하였다. Fig. 8과 같이 운영개념 하에서 흐름도를 작성하였다. 기존 마샬 안정도 시험기에 IG-IoT 보드를 이용하여 기존 센서를 연결하여 실험데이터를 컴퓨터로 데이터 조회가 가능하도록 하며, 또한 실시간으로 서버로 전송하고 선정 데이터를 클라우드에 저장하게 될 것이다. 이로 인해 아스팔트 플랜트 실험실 데이터가 IG-IoT 보드로 인해서 컨트롤 타워와 클라우드에 직접 전달되어 기록자의 오기 및 누락의 여지를 제거할 수 있을 것이라 사료된다. 최대 변위 한계를 20 mm 및 최대 하중을 3 t으로 최적화하여 Fig. 9과 같이 IG-IoT Version-1 보드를 제작하였다.
3.2 인디케이터 보완형 IoT 마샬 안정도 시험기 시험
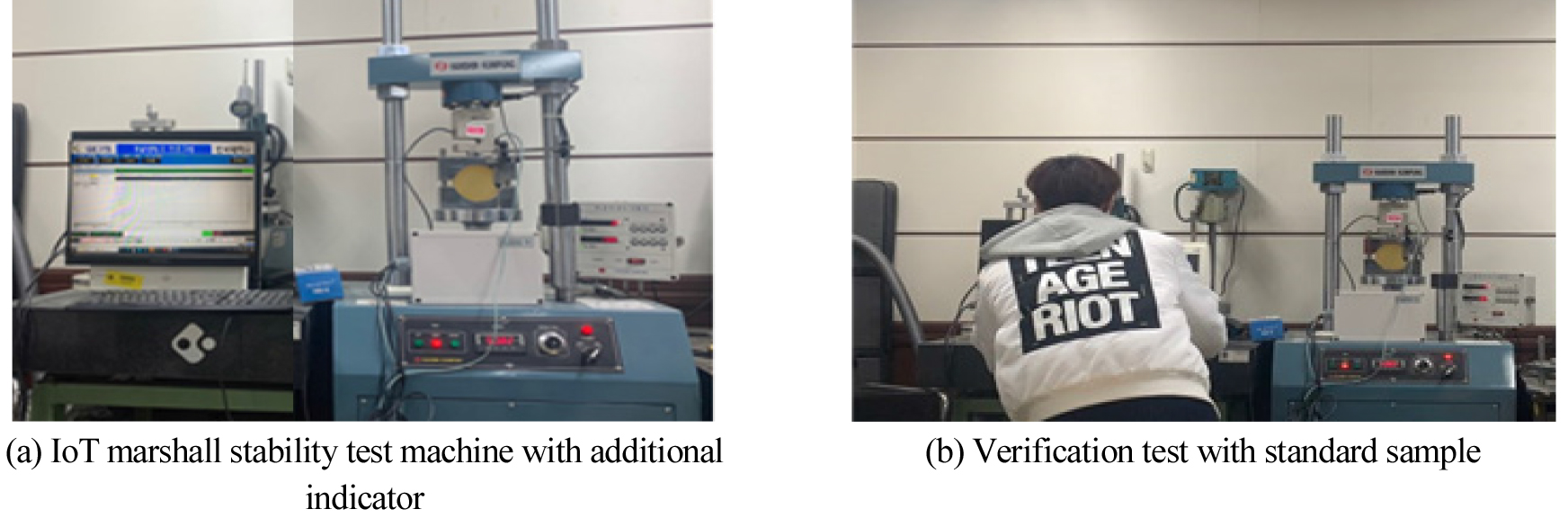
기존 마샬 안정도 시험기와 IG-IoT Version-1 보드를 부착한 인디케이터 보완형 IoT 마샬 안정도 시험기을 우레탄 표준시료를 이용하여 기존의 마샬 안정도 시험기와 인디케이터 보완형 IoT 마샬 안정도 시험기의 Round Robin Test를 실시하였다. 시험 장치 및 시험 전경은 Fig. 10과 같다. 비교 시험을 KS F 2337에 의거하여 흐름값(1/100 cm) (20 ~ 40) 기준에서 40으로 고정하여 시험을 실시하였으며 시험결과, 인디케이터 보완형 IoT 마샬안정도 시험기의 흐름값 36~40까지는 기존 마샬 안정도 시험기보다 작게 측정되며 오차가 평균 5.1%로 시험결과는 Choi et al. (2020)의 연구에서도 알 수 있다. 추후 오차 원인을 Round Robin Test를 통해 분석하여 보완할 예정이다.
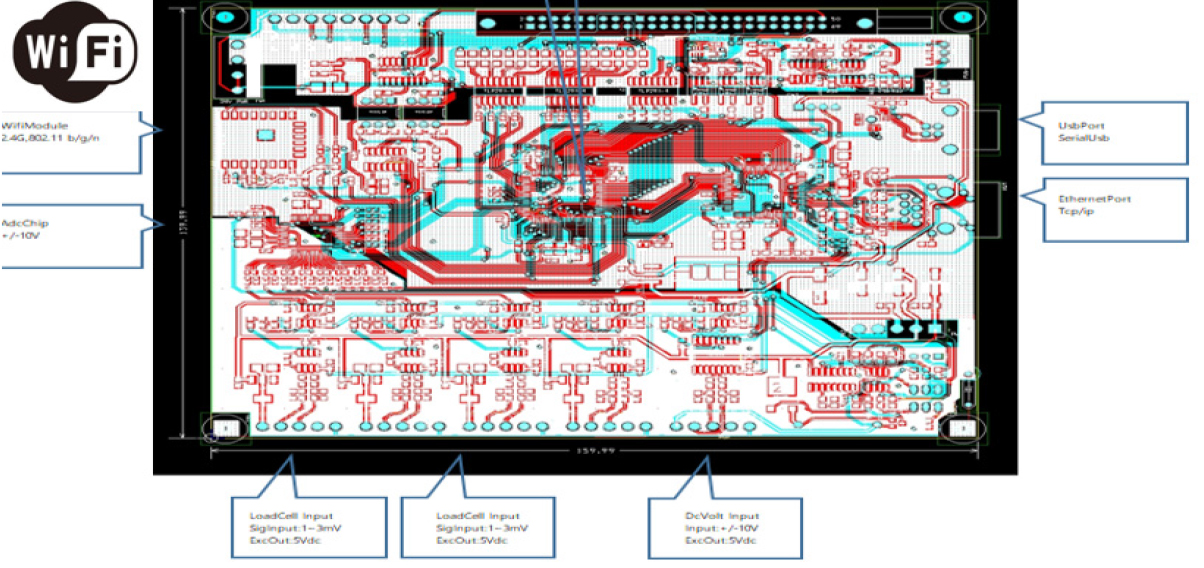
4. IG-IoT Version-2 보드 PCB 설계
IG-IoT Version-1 보드의 오차 수정 및 Wi-Fi 통신모듈을 추가하여 IG-IoT Version-2 보드 PCB를 Fig. 11과 같이 설계하였다.
5. 추후 연구 계획
추후 본 연구진은 IG-IoT Version-2 보드를 개발하여 IG-IoT Version-1 보드와 같은 비교 실험을 통한 오차 수정 및 검증을 할 예정이다. IG-IoT Version-2 보드를 적용하여 IoT 무선공유시스템을 활용한 마샬 안정도 시험기를 개발할 예정이다.
6. 결 론
본 연구에서는 기존 마샬 안정도 시험 시 실험자의 데이터 오기 및 누락의 여지를 방지하기 위해 IoT 마샬 안정도 시험기 제작을 제안하였다. 이에 따라 기존의 마샬 안정도 시험기에 IoT 무선공유플랫폼을 적용하여 시험자의 오기를 막고 필요한 일부 데이터를 프로그램에 거치지 않고 컴퓨터, 핸드폰으로 전송하여, 데이터 확인 이후에 전체 데이터가 서버로 전송이 될 수 있도록 하였다. IoT 마샬 안정도 시험기 제작을 위한 연구결과는 다음과 같다.
마샬 안정도 시험기의 IoT 시스템을 위해 기존 상용 보드의 적용성을 평가하였으며, 기존 상용 보드는 확장성이나 호환문제로 인해 적용하지 못하였다. 이러한 단점을 보완하여 IoT 무선공유플랫폼인 IG-IoT Version-1 보드를 시작품을 제작하였다. 정확성 분석을 위해 기존 고가형 데이터 로거인 DEWE-3020과 로드셀 하중 비교시험 및 포텐셔미터 변위 비교 시험을 실시하였다. 시험결과IG-IoT Version-1에서의 하중시험 최대오차는 1.2%, 포텐셔미터 변위 비교 시험결과 게이지펙터가 0.949에서 0.9852로 정확도가 상승하였다.
인디케이터 보완형 IoT 마샬 안정도 시험기 개발을 위해 최대 변위 한계를 20 mm 및 최대 하중을 3t으로 최적화하여 IG-IoT Version-1 보드를 제작하였다. 시험 결과 인디케이터 보완형 IoT 마샬 안정도 시험기에서 흐름값은 기존 마샬 안정도 시험기보다 작게 측정되나 오차가 평균 5.1%로 추후 오차 원인을 Round Robin Test를 통해 분석하여 보완할 예정이다.
IG-IoT Version-1 보드의 오차 보완 및 Wi-Fi 통신모듈을 추가하여 IG-IoT Version-2 보드 PCB를 설계하였으며 추후 본 연구진은 IG-IoT Version-2 보드를 개발 후 검증을 통해 IoT 무선공유시스템을 활용한 마샬 안정도 시험기를 개발할 예정이다.
